
EYEBOX™ motion planning for orchards and vineyards
Motion planning is one of the main components of any robotic system such as a driverless taxi, a robotic arm, an autonomous aircraft or an autonomous tractor. The motion of a robot can be defined by many different variables and parameters depending on the operation.
Motion planning has been studied and developed extensively in academia and industry over the past few decades and there are a lot of tools and methods available to solve challenging problems in different robotic applications. At Mojow, we are building one of the most advanced motion planning software for farming applications using state-of-the-art methods and algorithms to optimize farming operations. Our motion planning software plans a complete operation, for any number of farming machines, taking into account detailed logistic variables with many customizations available to the end user to adjust the motion plan.
In this blog post we introduce some of the features of the EYEBOX™ motion planning software for orchards and vineyards.
You might also be interested in our other blog post introducing EYEBOX™ motion planning for broadacre farming.
How does it work?
Our motion planning software is available in the EYEBOX™ mobile application (or it can be embedded into any OEM in-cab monitor). Using it is as easy as choosing your parameters of interest by selecting a few buttons.
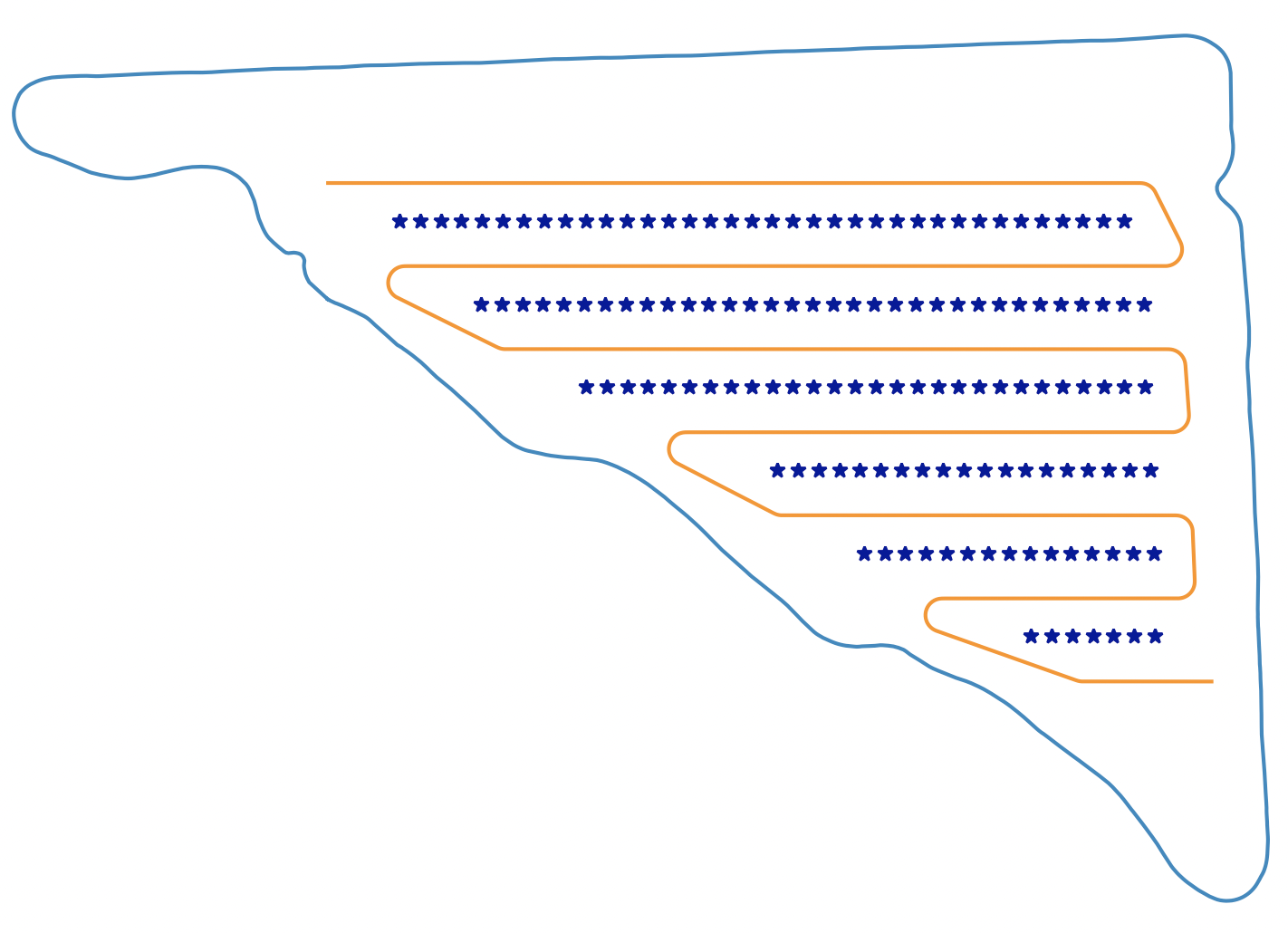
Here, we go through the process for planning a path for any field. The main input to our software is the boundary map. EYEBOX™ can easily:
- Map and manage any boundary geometry including fields, job sites, obstacles, speed zones, field entrances, roads, and routes.
- Map anything you want while manually driving a power unit equipped with EYEBOX™.
- Use the EYEBOX™ app to map anything you want by drawing a boundary map over a map overlay.
- Share maps with multiple users.
- Easily edit map geometry afterwards to allow for flexibility or changing field conditions.
Boundaries are generated by a human operator using proprietary EYEBOX™ mapping software. Once your boundary maps are available in EYEBOX™, you can start using our motion planning software and plan your missions from the mobile app by following the steps below:
- Select your field
- Press the “Plan” button.
- Adjust the parameters of interest or go with the default selections. You have many customization options in the mobile app.
- Straight line speed
- U-turn speed
- Implement control action sequence at U-turn
- Location to start the implement application
- Location to end the implement application
- Move mission speed
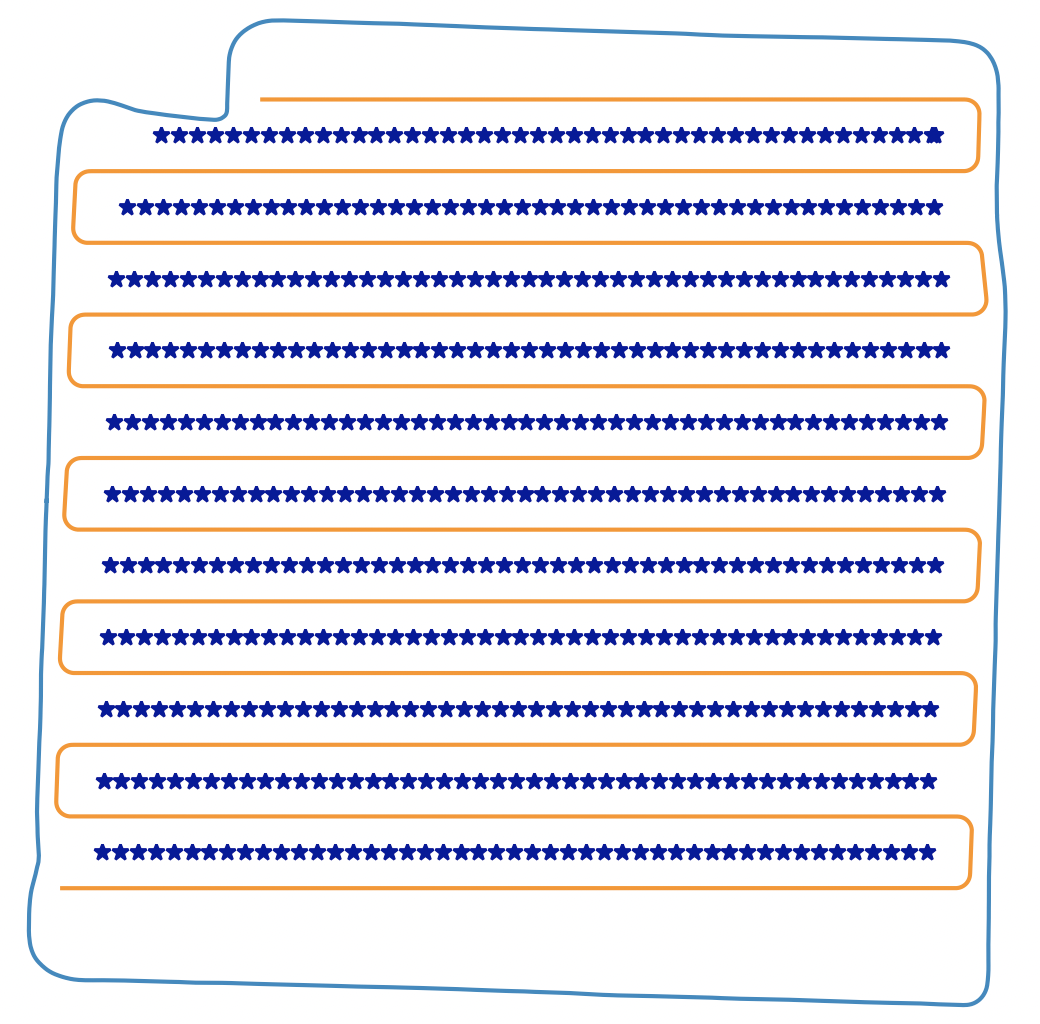
- View the path plan on the map.
- If you’re happy with the results, press “Save” to save the path plan in the database for use by the autonomous tractor.
- After saving, any approved user at your farm will be able to view the path plan and very easily use it for any implement applications.
Advanced features
Our motion planning software has specific features allowing the user to customize their operation however they want.
- Simple to create “move” missions and re-use them later in the future. A simple move mission could be utilized to drive a tractor from one job or task to the next.
- Fleet management software for multiple machines.
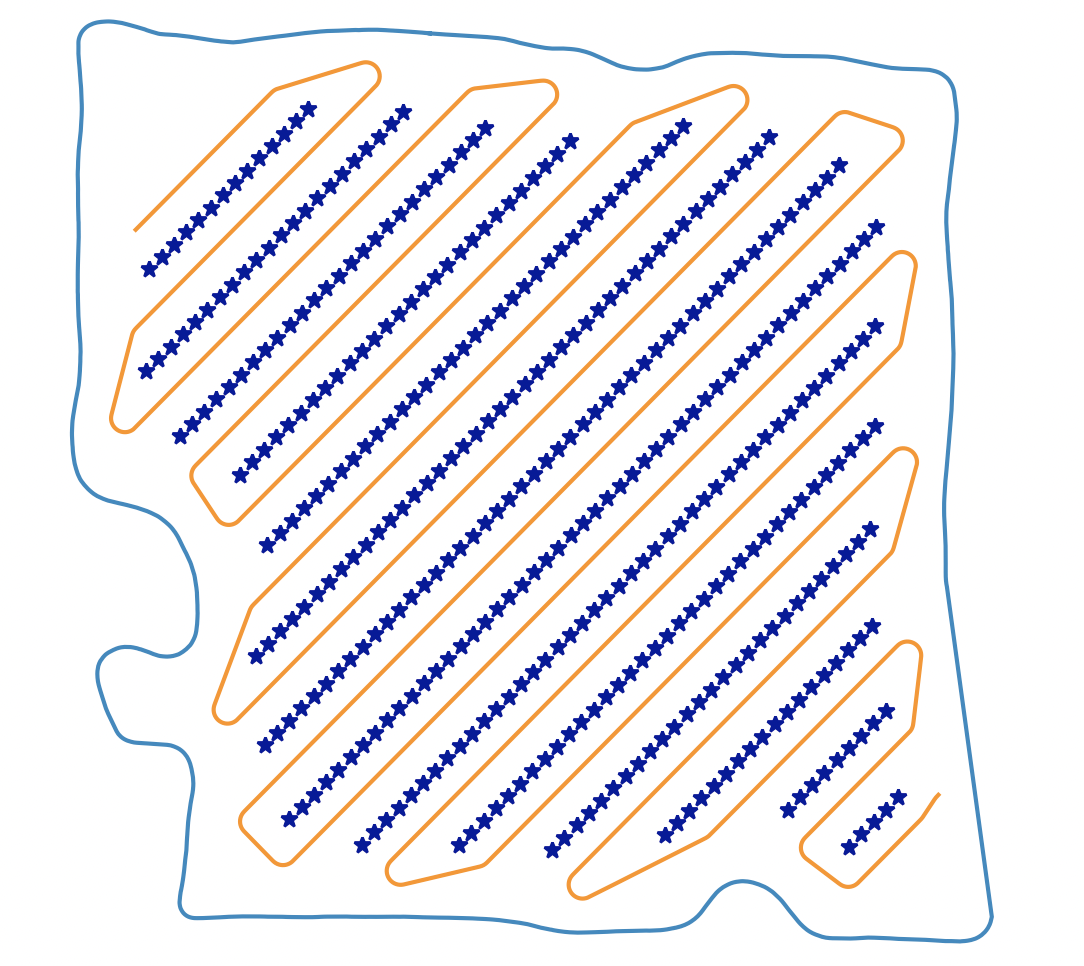
- Optimization of the planning software by comparing performance of different path plans. We suggest the most efficient path plan to minimize total distance traveled
- Safety package for real-time obstacle detection and avoidance to prevent collisions with any unmapped obstacles within the tractors intended path. Detects obstacles of any size: humans, animals, trucks, farm equipment, power poles, hay bales, etc.
- Turn optimization software for any size of power unit or trailing implement configuration.
- Onboard and offboard software packages for OEMs devices.
- Ability to continue operations within a GPS denied environment utilizing vision based navigation.
User interface
Our user interface allows for 100% control over the operation at all times:
- View all machines and operation progress in real-time.
- Livestream any camera.
- Adjust the maps, path plans, speed and implement options on the go in real time.
- Start/pause/resume/stop operation.
- Notifications or defined actions based on alarm hierarchy.
- Access to all historical performance data.
- IOS / Android / or local in-cab compatible.
3rd party API
Our motion planning software is a standalone service that can be integrated with any other 3rd party software using our API. For more information about our 3rd party API, please contact our team by emailing info@mojow.ai